

Raggiunto l’anno 1971 e la quindicesima missione del programma Apollo, nonché quarta destinata a raggiungere la superficie lunare, la NASA su trovò ad affrontare un significativo dilemma. Nonostante nessun geologo fosse materialmente stato sul satellite terrestre ed i campioni di suolo di cui disponevano fossero sostanzialmente insufficienti a farsi un’idea della composizione e natura del suolo, i progettisti si resero effettivamente conto che scendere soltanto dal modulo di atterraggio, potendo muoversi in qualche decina di metri in ogni direzione, non era realmente sufficiente a colmare la carenza di dati disponibili in tal senso. Essi avrebbero perciò dovuto includere, nel carico di volo, un qualche tipo di veicolo semovente, la cui natura e caratteristiche potevano soltanto essere ottimizzate grazie all’uso di una lunga serie d’ipotesi e supposizioni. Quello del cosiddetto rover lunare costituiva, a dire il vero, un concetto dalla lunga storia, rintracciabile fin da scritti e disegni dei tecnici sotto la supervisione di Wernher von Braun, nell’installazione tedesca di Peenemünde. Ben dopo l’esecuzione dell’operazione Paperclip e la conseguente assunzione dei numerosi scienziati di epoca nazista tra le fila del progetto spaziale statunitense, l’intera idea era stata incorporata nel piano per l’esplorazione in varie iterazioni successive, capaci di partire dal fondamentale presupposto che gli astronauti, durante il proprio soggiorno lassù, avrebbero potuto trarre beneficio dall’impiego di un qualche tipo di base semovente. In tal senso il modo in cui venne concepito inizialmente l’automobile spaziale prevedeva un abitacolo pressurizzato, facendo di essa l’equivalente di un moderno camper, veicolo pickup o furgoncino per il trasporto di cose o persone sulla media distanza. Il problema stesso del peso dovuto all’inclusione di una simile risorsa, d’altra parte, risultava essere meno stringente causa l’originale passaggio tenuto in alta considerazione fino al 1968, secondo cui per ciascuna singola missione i razzi Saturn V scagliati oltre l’orbita sarebbero stati due, uno con l’equipaggio e l’altro sormontato come carico dal velivolo LM Truck, un lander a controllo remoto riempito di strumenti, materiali ed almeno un mezzo con ruote per uso e consumo della controparte “umana” allunata auspicabilmente a poche decine di metri di distanza. La prima compagnia contattata per offrire il suo contributo in tal senso sarebbe stata la Bendix Corporation, già fornitrice di strumentazione scientifica impiegata durante le precedenti escursioni extraterrestri, la quale pensò di far ricorso a ciò di cui il programma Apollo già disponeva ed aveva avuto modo di conoscere in precedenza: così nacquero i bizzarri fuoristrada denominati per l’occasione MOLEM e MOCOM. Rispettivamente la versione dotata di ruote di un intero lander per l’allunaggio, oppure la sola sommità di questo, ovvero l’oggetto destinato a ritornare nello spazio che corrispondeva essenzialmente al modulo di comando…
All’inizio: il MOLAB della General Motors
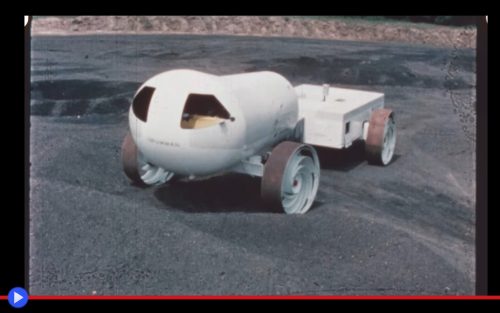
L’idea era intrigante, ma inerentemente limitata da fattori di contesto inizialmente non del tutto considerati. Il MOLEM era infatti tanto pesante e dispendioso in termini di carburante da risentire di un raggio d’azione giudicato eccessivamente limitato, mentre il MOCAM risultava eccessivamente angusto, richiedendo addirittura che il guidatore rimanesse in piedi nel corso dell’intero utilizzo. La Bendix pensò dunque entro il 1966 di offrire una terza opzione con l’apparato CAN, “lattina” un ipotizzato veicolo cilindrico che avrebbe trovato collocazione nel razzo Saturn tra il LEM e l’ultimo stadio, potendo fornire tutto lo spazio necessario alla ricerca scientifica ed un prolungato soggiorno alla piccola squadra dei due astronauti lunari. Ma esso fu giudicato eccessivamente pesante per i limitati vantaggi addizionali rispetto agli altri modelli, con un totale di 4326 Kg per 200 Km teorici di autonomia. La NASA aveva nel frattempo immaginato d’impiegare in parallelo un approccio progettuale maggiormente collaudato, coinvolgendo nell’impresa niente meno che la principale azienda motoristica statunitense, la General Motors. Il che avrebbe portato, in quella stessa metà degli anni ’60 (la cronologia è tutt’altro che chiara) alla creazione del MOLAB, un fuoristrada con abitacolo dalla forma vagamente cilindrica del peso di “appena” 3810 Kg, grazie all’impiego di fibra di vetro nella sua struttura ed altri accorgimenti strategici funzionali. Esso avrebbe, d’altronde, potuto essere utilizzato per un intero soggiorno ipotetico di 14 giorni sulla Luna, offrendo uno spazio interno protetto dal vuoto in cui gli astronauti avrebbero potuto togliersi le tute e lavorare agevolmente ai propri esperimenti geologici e di altra natura. La velocità sarebbe stata di 16 Km/h e la portata, a seconda della versione effettivamente impiegata. fino 396 Km totali. Nella pletora dei numerosi concept prodotti in quegli anni, il MOLAB spicca d’altra parte per un singolo fattore di rilievo: il fatto che un prototipo sia stato, materialmente, costruito e messo alla prova nel deserto dell’Arizona usando un motore a combustione interna di tipo terrestre prodotto dalla Corvair. Dimostrando caratteristiche che almeno in linea di principio sarebbero bastate a farne un’importante risorsa per l’esplorazione lunare, comprensiva di apparecchiature ingombranti come uno spettrografo di massa ed il trapano geologico per il prelievo di campioni sepolti sotto un solido strato di selenite. Condotto in parallelo, con ancor meno dati di riferimento online, fu il progetto della Grumman per il Lunar Logistics System, un altro furgone cilindrico del peso di 680 Kg, non efficientemente scalabile ma dotato questa volta di un rimorchio, per un impiego modificabile in base alle esigenze delle diverse fasi della missione. Raggiunto il 1968 d’altra parte, con la riduzione dei fondi al programma Apollo e la conseguente quantità di razzi Saturn V a disposizione, gli addetti del Marshall Space Center che stavano lavorando alle diverse versioni per conto della NASA si trovarono a dover fare i conti con un radicale cambio di paradigma. Allorché ciascuna missione avrebbe potuto contare unicamente su un singolo modulo d’atterraggio, all’interno del quale, dunque, avrebbe dovuto trovare collocazione sia l’equipaggio che il rover lunare.

La conseguenza di un tale approccio è da noi ben conosciuta, con le iterazioni successive del veicolo capaci di condurre all’effettivo Lunar Roving Vehicle (LRV) che avrebbe successivamente trovato l’impiego nelle ultime tre missioni del progetto Apollo: la 15, la 16 e la 17. Un mezzo non dissimile da una dune buggy priva di abitacolo, configurato come poco più di un telaio su ruote del peso di 210 Kg, sopra cui due astronauti in tuta spaziale avrebbero potuto essere trasportati, assieme al carico, per un gran totale di 92 Km. Nonché dotato successivamente (fattore assolutamente fondamentale) di una telecamera a colori destinata a riprendere il LEM durante il decollo, quando fosse stato lasciato come da copione, in ciascuna delle tre occasioni d’impiego, a perenne testimonianza del passaggio umano tra la polvere del suolo lunare. Mentre il MOLAB avrebbe trovato, se non altro, alcuni impieghi paralleli: come laboratorio semovente per il servizio geologico per alcuni anni, prima di fare una breve comparsa nel film post-apocalittico del 1979, “I predatori dell’anno 2000”. Venendo infine relegato al museo dell’US Space & Rocket Center in Alabama, dove si trova tutt’ora.
Grandi traguardi ma ancor più significative occasioni di rinuncia. Poiché soltanto in occasione dell’attuale programma Artemis per il ritorno statunitense di esseri umani sulla Luna entro l’anno 2027 (ma il traguardo cronologico è stato già spostato più volte) si prospetta nuovamente di poter mandare sul nostro satellite un qualche tipo di fuoristrada pressurizzato. Ovvero in questo caso il Lunar Terrain Vehicle (LTV) con le sue ruote capaci di voltarsi a 360 gradi ed il grande parabrezza panoramico frontale, da un abitacolo destinato ad inquadrare alcuni degli scorci paesaggistici più singolari dell’intera esperienza umana pregressa, presente o connessa al prossimo futuro. A meno che ci riesca, in tempo utile, di sfruttare le risorse rimanenti per oltrepassare il velo della rarefatta atmosfera marziana.