
Molte parole sono state spese sulla presunta inutilità del dittero succhiasangue, che disturba le nostre notti, si riproduce con estrema efficacia e talvolta finisce per diffondere problematiche malattie. Piccole forme saettanti, appena visibili nella luce del Sole al tramonto; creature ronzanti (persino il rumore dà fastidio!) che ben pochi esitano ad uccidere, persino tra coloro che si dicono amanti degli insetti. Perché in fondo, cos’ha di paragonabile, la vicina genetica del pappatacio o del flebotomo comune, con un utile e benamata ape, o persino una feroce vespa predatrice, che per lo meno elimina la diffusione di altre piccole creature invasive… Esse semplicemente sono, e attraverso quel fitto e insistente svolazzare, mettono alla prova l’umana pazienza? Certo. Eppure, a volerla comprendere, c’è anche un’utile lezione che possiamo apprendere dalla vicenda esistenziale di simili creature. Se c’è qualcosa di cui sarebbe difficile dubitare, in effetti, è proprio la sua efficacia nel portare a termine quello che fa. Un animale parassita, naturalmente, dovrebbe essere del tutto incapace di sopravvivere sulle sue forze, totalmente incapace di procacciarsi il cibo sulle sue forze. Mentre la forma della zanzara, per invertire una famosa citazione del web sul calabrone, attribuita, a seconda dei casi a personalità del calibro di Albert Einstein o Marilyn Monroe, è perfettamente adatta a volare. E lei lo sa benissimo. Come anche il qui presente robotista, parte del gruppo di ricercatori del laboratorio BDML dell’Università di Stanford (Biomimetics and Dextrous Manipulation Lab) il quale ne ha ripreso le caratteristiche assieme ai suoi colleghi, per creare un dispositivo volante che non solo rivoluziona il concetto di drone, ma apre la strada a numerose innovazioni tecnologiche che di qui a pochi mesi potremmo anche ritrovare nei campi più diversi, incluso quello militare.
C’è un che di lievemente inquietante, in effetti, nel vedere il gesto disinvolto con cui il giovane lascia decollare il suo SCAMP, questo l’acronimo del robo-quadricottero, dal palmo aperto di una mano, soltanto per vederlo fluttuare verso il muro ed attaccarvisi, iniziando la sua inesorabile scalata verso la cima. La suggestione è un po’ la stessa creata a suo tempo dalla scena del film Dracula di Bram Stoker, con l’attore Gary Oldman nel ruolo dell’improbabile Conte, che risaliva la torre del castello aggrappandosi come una sorta di gigantesco ragno umano. Ed anche l’utilità, sostanzialmente è quella: giacché possiamo presumere, nell’analisi scientifica di quell’altro goloso d’emoglobina, che la “modalità pipistrello”, per così dire, comporti un dispendio di energie vampiresche relativamente congruo. Mentre possiamo presumere che sfruttare la propria agilità e forza sovrumane, per aggrapparsi alle asperità di un vecchio maniero e fare ritorno alla propria bara (rigorosamente prima dell’alba) sia un’impresa assolutamente da nulla, per il signore delle tenebre perennemente redivivo. Lo SCAMP ad ogni modo, nonostante il suggestivo acronimo, che sta per Stanford Climbing and Aerial Maneuvering Platform ma significa anche un qualcosa di affine a “simpatico malandrino”, è uno strumento creato rigorosamente al servizio del bene. Come già altri progetti comparabili fuoriusciti dallo stesso ambito accademico, la sua presunta finalità in tale forma sarà l’assistere in caso di disastri naturali, volando sulla scena per effettuare rilevamenti e trovare i sopravvissuti. Con in più il vantaggio aggiunto, come dicevamo, di poter risparmiare la limitata energia a disposizione nelle sue piccole batterie, posandosi a riposare sulle superfici verticali, prima di spiccare nuovamente il volo verso località maggiormente accoglienti. Così facendo, inoltre, potrà aggrapparsi e salire verso l’alto, guadagnando quota senza ricorrere alla dispendiosa accensione continuativa delle sue quattro pale. Ed è una visione certamente inaspettata, questa di un essere così evidentemente artificiale, che tuttavia si comporta in maniera del tutto paragonabile a quella dell’insetto più odiato del mondo! Che di sicuro, mentre risaliva gli edifici dell’università, deve aver fatto voltare parecchie teste, dando adito a un senso diffuso d’entusiasmo misto a sorpresa. Quest’ultima, tuttavia, soltanto per le matricole, o tutti coloro che si trovavano lì in via occasionale. Questo perché in effetti, il robot in questione non è un’invenzione che viene dal nulla, ma soltanto l’ennesima, e forse più affascinante applicazione di un vasto ventaglio di concetti, che il laboratorio BDML sta prendendo in analisi da ormai diversi anni, portandoli fino alle loro conseguenze più estreme. Un progetto trasversale, che mira a dimostrare, reimpiegandola, l’utile capacità di certi animali ad aderire alle superfici, trovandosi quindi avvantaggiati nella loro locomozione, o dotati di una forza di molto superiore al dovuto. Pensate, ad esempio, a una formica che trascina un qualcosa di molto superiore al suo peso. Potrebbe davvero farlo, se non avesse l’innata dote di “aggrapparsi” al suolo, prima di ciascun singolo oh, issa! Seguito da un singolo passo e poi di nuovo, piedi ben saldi e tirare? Un’impresa che la camminatrice può compiere, unicamente grazie a una cuticola flessibile presente sotto ciascuna delle sue sei zampe. Mentre la zanzara robot di Stanford, in effetti, sfrutta un sistema notevolmente diverso…
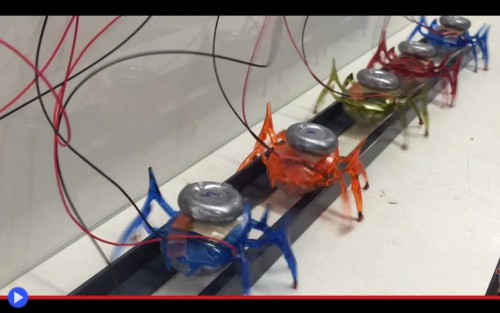
Questo perché l’idea, che fu resa pubblica nel 2006 con la pubblicazione dell’articolo Scaling Hard Vertical Surfaces with Compliant Microspine Arrays (The International Journal of Robotics, Volume 25 Numero 12) era sempre stata quella di disporre di un approccio che fosse al tempo stesso scalabile e adatto a un tipo di superfici più diffuse per le pareti degli edifici, quali ad esempio cemento, muratura, stucco, mattoni… Tutte situazioni ricche di asperità, in cui l’approccio della formica avrebbe potuto funzionare a piena efficacia soltanto su una scala notevolmente ridotta. Così l’idea fu, con il qui mostrato Spinybot II, di costruire un sistema basato su un alto numero di piccole spine uncinate, ovvero rivolte verso una direzione preferita ed utile ad aggrapparsi, in modo assolutamente automatico, a qualsiasi minuscola rientranza esistente. Ciò sfruttando un particolare tipo di sospensioni, operanti su ciascuna zampa dell’insetto robotico, che potessero massimizzare l’aderenza alla parete in ogni possibile circostanza. Con l’obiettivo, rigorosamente teorico, di trasportare verso l’alto un carico pressoché equivalente al suo peso, portando soccorsi alle ipotetiche vittime del solito disastro, stavolta misteriosamente rimaste bloccate sulla cima di un edificio. Un tema che ritornerà successivamente nei robottini µTug dello scorso anno, basati invece sul principio dell’adesione anisotropica, la stessa, per intenderci delle zampe del geco, che si arrampica sfruttando la deformazione direzionale di un alto numero di estrusioni carnose, che massimizzando la superficie a contatto con la parete, diventano in grado di sostenere il suo stesso peso, nella maggior parte delle possibili situazioni. Mentre nella versione artificiale della stessa cosa, il principio si era dimostrato soprattutto utile su vetro, o pareti estremamente lisce, dimostrandosi quindi perfettamente complementare con il sistema dello Spinybot (nonché dello SCAMP). Un progetto per abbinare i due metodi, per averli a disposizione nelle versioni future di questi o di altri robot, è ovviamente in studio da tempo. Ma la sua realizzazione, da un punto di vista meramente ingegneristico, si sta rivelando più complessa del previsto e per questo non la troviamo applicata, né qui né altrove.
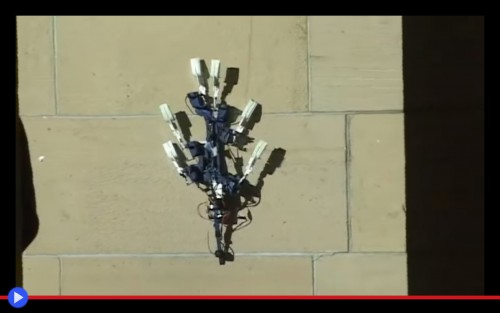
Sia comunque di nuovo chiaro che la zanzara SCAMP non dimostra soltanto capacità di aderenza, bensì, per la prima volta tra le auguste (o anguste?) sale del BDML, anche la dote assai significativa del volo. Ed è proprio dal metodo usato per coniugare i due aspetti, che si trova evidenziato l’ingegno notevole dei suoi progettisti. Ciò che sembrano essere, infatti, le antenne dell’insetto, sono in realtà i suoi due piedi di traino verso l’alto, ciascuno dotato delle microspine per aggrapparsi alle pareti. L’impiego di passi più lunghi, per minimizzare il dispendio di energia ed aumentare la capacità di aggrapparsi ad ogni superficie, non importa quanto diseguale, è una soluzione presa in prestito dagli insetti più grandi, come le cavallette o le mantidi religiose. Nella fase di transizione dal volo alla scalata, il drone dovrà quindi voltarsi, mettendo avanti la sua “coda” in realtà una sorta di asticella finalizzata al ribaltamento. Con l’urto di quest’ultima contro l’edificio, quindi, e il ritrovarsi in verticale dell’intero robot, le sue pale si troveranno a spingere verso la parete stessa, assicurando, o per lo meno, rendendo molto probabile, l’aderenza degli arti anteriori alla superficie verticale. A questo punto, con movimento alternato, lo SCAMP inizierà la sua lunga scalata. Ma poiché, naturalmente, gli incidenti possono sempre capitare, i tecnici di Stanford hanno anche previsto l’evenienza che entrambe le zampe perdano presa allo stesso tempo, generando un pericoloso inizio di caduta. Caso in cui, prendendo di nuovo ispirazione dal mondo naturale, la zanzara robot praticherà automaticamente un’ulteriore, breve accensione dei rotori indotta dai suoi sensori, spingendo con tutta la sua forza verso il muro, per ritrovarcisi nuovamente attaccata, senza quindi rovinare al suolo. Nel momento del decollo, quindi, gli basterà impiegare uno speciale arto retrattile posto sulla sua parte a contatto col muro, per ribaltarsi nuovamente all’indietro, accendendo di nuovo i quattro rotori. Per spostarsi o tornare a casa, completata la sua misteriosa missione.
Sorveglianza? Rilevamenti? Misurazioni? Telecomunicazioni? La consegna di un pacco molto piccolo, estremamente prezioso? Sarebbe teoricamente possibile, così per dire, montarvi sopra un sistema d’armi, per usarla come il più insolito strumento d’assassinio nella storia dell’uomo? Per fortuna, al momento no. La sua capacità di carico è, semplicemente, troppo ridotta. Viviamo tuttavia in un epoca, prendiamone atto, in cui le zanzare robot esistono. E presto verranno a visitarci. Sarà meglio dotarci, qualora possibile, di un cannone a rete…